State observers available for Upkies. More...
Classes | |
| class | BaseOrientation |
| Observe the orientation of the base frame relative to the world frame. More... | |
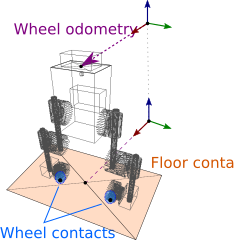
| class | FloorContact |
| Observe contact between the wheels and the floor. More... | |
| class | HistoryObserver |
| Report high-frequency history vectors to lower-frequency agents. More... | |
| class | Observer |
| Base class for observers. More... | |
| class | ObserverPipeline |
| Observer pipeline. More... | |
| class | WheelContact |
| Observe contact between a given wheel and the floor. More... | |
| class | WheelOdometry |
| Observe the relative motion of the floating base with respect to the floor. More... | |
Functions | |
| Eigen::Matrix3d | compute_base_orientation_from_imu (const Eigen::Quaterniond &quat_imu_in_ars, const Eigen::Matrix3d &rotation_base_to_imu, const Eigen::Matrix3d &rotation_ars_to_world) |
| Get the orientation of the base frame with respect to the world frame. More... | |
| double | compute_pitch_frame_in_parent (const Eigen::Matrix3d &orientation_frame_in_parent) |
| Get pitch angle of a given frame relative to the parent vertical. More... | |
| double | compute_base_pitch_from_imu (const Eigen::Quaterniond &quat_imu_in_ars, const Eigen::Matrix3d &rotation_base_to_imu, const Eigen::Matrix3d &rotation_ars_to_world) |
| Get pitch angle of the base frame relative to the world frame. More... | |
| Eigen::Vector3d | compute_base_angular_velocity_from_imu (const Eigen::Vector3d &angular_velocity_imu_in_imu, const Eigen::Matrix3d &rotation_base_to_imu) |
| Compute the body angular velocity of the base from IMU readings. More... | |
| void | observe_servos (palimpsest::Dictionary &observation, const std::map< int, std::string > &servo_name_map, const std::vector< ServoReply > &servo_replies) |
| Observe servo measurements. More... | |
| void | observe_time (Dictionary &observation) |
| Observe time since the epoch. More... | |
Detailed Description
State observers available for Upkies.
State observation.